

-
- 公司:
- 深圳基准机器人设计公司
-
- 联系:
- 龚玟宾
-
- 邮箱:
- bmid@benchmark-id.com
-
- 手机:
-
13807495700
13808412765
-
- 电话:
-
0755-23761048
-
- 地址:
- 深圳市南山区前海月亮湾大道2076号中国高科大厦D栋7楼
-
- 微信:
-



- 新手设计师经常会犯的三个产品设计错误?1137阅读 2022-11-08 10:20:20
- 产品外观设计全过程中的难题947阅读 2022-11-08 10:18:51
- 产品外观设计过程中会出现什么问题1004阅读 2022-11-08 10:16:45
- 机械设备外观设计和艺术设计之间的对比1030阅读 2022-11-08 10:14:26
- 产品外观设计基础规定详细介绍1296阅读 2022-11-08 10:13:09

深圳找厂家机器人结构设计,客户满意度高
2024-05-02 01:00:01 1037次浏览

价 格:面议
承载能力是指机器人在工作范围内的任何位姿上所能承受的质量。机器人的载荷不仅取决于负载的质量,而且还与机器人运行的速度和加速度的大小和方向有关。为了起见,承载能力是指高速运行时的承载能力。通常,承载能力不仅要考虑负载,而且还要考虑机器人末端操作器的质量。
机器人或机械手各动作的行程确定之后,可根据生产需要的工作节拍分配每个动作的时间,进而确定各动作的运动速度。如一个机器人操作臂要完成某一工件的上料过程,需完成夹紧工件,手臂升降、伸缩、回转等一系列动作,这些动作都应该在工作节拍所规定的时间内完成。至于各动作的时间究竟应如何分配,则取决于很多因素,不是一般的计算所能确定的。要根据各种因素反复考虑,并试作各动作的分配方案,进行比较平衡后,才能确定。节拍较短时,更需仔细考虑。
伸缩运动的速度要大于回转运动的速度。因为回转运动的惯性一般大于伸缩运动的惯性。机器人或机械手升降、回转及伸缩运动的时间要根据实际情况进行分配。如果工作节拍短,上述运动所分配的时间就短,运动速度就一定要提高。但速度不能太高,否则会给设计、制造带来困难。在满足工作节拍要求的条件下,应尽量选取较低的运动速度。机器人或机械手的运动速度与臂力、行程、驱动方式、缓冲方式、定位方式都有很大关系,应根据具体情况加以确定。
还可以实时的向外界反馈人体内部的情况,方便医生及时做出判断和制定医疗计划。有些疾病的检查和手段会给患者造成大量的痛苦,比如胃镜,利用微型机器人就可以在避免增加患者痛苦的前提下完成身体内部的健康检查。目前制约微型机器人发展的关键因素在于成本非常昂贵,稀有金属的替代品的寻找将成为未来发展的重要方向。
-
 气压驱动具有速度快、系统结构简单、维修方便、价格低等优点。但是气压装置的工作压强低,不易定位,一般仅用于工业机器人末端执行器的驱动。气动手抓、旋转气缸和气动吸盘作为末端执行器可用于中、小负荷的工件抓取和装配。机器人感知系统把机器人各种内部状21-11-06 08:33:02
气压驱动具有速度快、系统结构简单、维修方便、价格低等优点。但是气压装置的工作压强低,不易定位,一般仅用于工业机器人末端执行器的驱动。气动手抓、旋转气缸和气动吸盘作为末端执行器可用于中、小负荷的工件抓取和装配。机器人感知系统把机器人各种内部状21-11-06 08:33:02 -
 好的形式和高技术产品的产品比竞争公司更突出。今天的社会中,消费者自己的理解情况,产品不仅可以利用不理解。他们所寻找的东西反映了自己的价值观,是一种完全的产品,资质是丰富自己的生活。姿势和技术是我们的产品,为了评价不可缺少的必要条件。基于形式21-10-20 17:18:01
好的形式和高技术产品的产品比竞争公司更突出。今天的社会中,消费者自己的理解情况,产品不仅可以利用不理解。他们所寻找的东西反映了自己的价值观,是一种完全的产品,资质是丰富自己的生活。姿势和技术是我们的产品,为了评价不可缺少的必要条件。基于形式21-10-20 17:18:01 -
 伺服 ①快速响应,定位 伺服的响应时间直接影响到机器人的快速起停效果,影响机器人的工作效率和节拍。 [5] ②无传感器方式实现弹性碰撞 性是衡量机器人性能的一个重要指标。加入力或力矩传感器会使结构更复杂,成本更高,基于编码器、电机电流耦合关21-10-26 10:54:01
伺服 ①快速响应,定位 伺服的响应时间直接影响到机器人的快速起停效果,影响机器人的工作效率和节拍。 [5] ②无传感器方式实现弹性碰撞 性是衡量机器人性能的一个重要指标。加入力或力矩传感器会使结构更复杂,成本更高,基于编码器、电机电流耦合关21-10-26 10:54:01 -
 当然设计出来的机器人外观,能否实现的了量产,考验设计师的设计经验,很多工业设计师能够从技术、材质、工艺等条件上,判断所设计的机器人外观是能够实现得了量产。机器人设计图设计元素 1、我们创意中的机器人是一个戴着头盔的形象,它的耳朵两边有着两根21-11-29 08:51:01
当然设计出来的机器人外观,能否实现的了量产,考验设计师的设计经验,很多工业设计师能够从技术、材质、工艺等条件上,判断所设计的机器人外观是能够实现得了量产。机器人设计图设计元素 1、我们创意中的机器人是一个戴着头盔的形象,它的耳朵两边有着两根21-11-29 08:51:01 -
 这也很考验设计师的能力,“很多机器人企业抛出很多概念性的东西,然后设计师需要去寻找大量的素材,又要贴合客户的要求,把外观设计具体化,这很考验设计师的能力。”不管是商用类、家用类、还是教育陪伴类机器人,没有办法用一种设计方案去应对所有的使用场21-11-06 10:45:01
这也很考验设计师的能力,“很多机器人企业抛出很多概念性的东西,然后设计师需要去寻找大量的素材,又要贴合客户的要求,把外观设计具体化,这很考验设计师的能力。”不管是商用类、家用类、还是教育陪伴类机器人,没有办法用一种设计方案去应对所有的使用场21-11-06 10:45:01 -
驱动系统是向机械结构系统提供动力的装置。根据动力源不同,驱动系统的传动方式分为液压式、气压式、电气式和机械式4种。早期的工业机器人采用液压驱动。由于液压系统存在泄露、噪声和低速不稳定等问题,并且功率单元笨重和昂贵,目前只有大型重载机器人、并21-11-06 10:33:01
-
 家用机器人的总销售量预计将超过30万台,它表明服务机器人市场即将进入一个崭新的阶段。从需求及设备现有的技术水平方面来看,残疾人用的机器人还没有达到人们预期的目标。未来10年,助残机器人肯定会成为服务机器人的一个关键的领域。许多重要的研究机构19-07-09 12:30:01
家用机器人的总销售量预计将超过30万台,它表明服务机器人市场即将进入一个崭新的阶段。从需求及设备现有的技术水平方面来看,残疾人用的机器人还没有达到人们预期的目标。未来10年,助残机器人肯定会成为服务机器人的一个关键的领域。许多重要的研究机构19-07-09 12:30:01 -
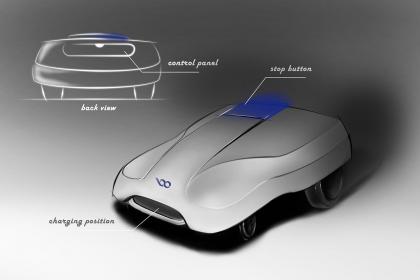
 不管是商用类、家用类、还是教育陪伴类机器人,没有办法用一种设计方案去应对所有的使用场景。图1是洛斯奇去年为联想设计的家庭机器人方案之一,联想要求设计出来的机器人适用于家庭,外观要能让家人感到感,而且容易被接纳,能成为家庭一员的角色。 产品外21-11-29 08:54:01
不管是商用类、家用类、还是教育陪伴类机器人,没有办法用一种设计方案去应对所有的使用场景。图1是洛斯奇去年为联想设计的家庭机器人方案之一,联想要求设计出来的机器人适用于家庭,外观要能让家人感到感,而且容易被接纳,能成为家庭一员的角色。 产品外21-11-29 08:54:01 -
 工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。当今工19-07-09 14:24:01
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。当今工19-07-09 14:24:01 -
 伺服 ①快速响应,定位 伺服的响应时间直接影响到机器人的快速起停效果,影响机器人的工作效率和节拍。 [5] ②无传感器方式实现弹性碰撞 性是衡量机器人性能的一个重要指标。加入力或力矩传感器会使结构更复杂,成本更高,基于编码器、电机电流耦合关21-10-26 10:51:01
伺服 ①快速响应,定位 伺服的响应时间直接影响到机器人的快速起停效果,影响机器人的工作效率和节拍。 [5] ②无传感器方式实现弹性碰撞 性是衡量机器人性能的一个重要指标。加入力或力矩传感器会使结构更复杂,成本更高,基于编码器、电机电流耦合关21-10-26 10:51:01 -
 从机械结构来看,工业机器人总体上分为串联机器人和并联机器人。串联机器人的特点是一个轴的运动会改变另一个轴的坐标原点,而并联机器人一个轴运动则不会改变另一个轴的坐标原点。早期的工业机器人都是采用串联机构。并联机构定义为动平台和定平台通过至少两21-11-06 10:24:01
从机械结构来看,工业机器人总体上分为串联机器人和并联机器人。串联机器人的特点是一个轴的运动会改变另一个轴的坐标原点,而并联机器人一个轴运动则不会改变另一个轴的坐标原点。早期的工业机器人都是采用串联机构。并联机构定义为动平台和定平台通过至少两21-11-06 10:24:01 -
 想要降低出错的概率,我们就要做好规划,有计划的进行,而进行机器人设计也是如此。为了顺利进行机器人设计,下面为大家说一下机器人设计步骤。 一、机器人设计和大部分的机械设计过程是差不多的,首先需要知道机器人设计的目的,机器人能够实现哪些功能以及22-09-28 21:30:17
想要降低出错的概率,我们就要做好规划,有计划的进行,而进行机器人设计也是如此。为了顺利进行机器人设计,下面为大家说一下机器人设计步骤。 一、机器人设计和大部分的机械设计过程是差不多的,首先需要知道机器人设计的目的,机器人能够实现哪些功能以及22-09-28 21:30:17 -
 已知最早的工业机器人,其符合ISO定义,是由“条例”格里菲斯P·泰勒于1937年完成并出版的Meccano杂志,1938年3月。几乎完全是用吊车状装置建成的Meccano件和动力由单个电动机。运动五轴是可能的,包括抢而抢旋转。自动化是用穿孔19-07-09 18:54:01
已知最早的工业机器人,其符合ISO定义,是由“条例”格里菲斯P·泰勒于1937年完成并出版的Meccano杂志,1938年3月。几乎完全是用吊车状装置建成的Meccano件和动力由单个电动机。运动五轴是可能的,包括抢而抢旋转。自动化是用穿孔19-07-09 18:54:01 -
 数据显示,目前,世界上至少有48个国家在发展机器人,其中25个国家已涉足服务型机器人开发。在日本、北美和欧洲,迄今已有7种类型计40余款服务型机器人进入实验和半商业化应用。近年来,全球服务机器人市场保持较快的增长速度,根据国际机器人联盟的数19-07-09 18:20:01
数据显示,目前,世界上至少有48个国家在发展机器人,其中25个国家已涉足服务型机器人开发。在日本、北美和欧洲,迄今已有7种类型计40余款服务型机器人进入实验和半商业化应用。近年来,全球服务机器人市场保持较快的增长速度,根据国际机器人联盟的数19-07-09 18:20:01 -
 工业机器人按臂部的运动形式分为四种:直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。机器人结构设计就找深圳基准机器人设计公司。工业机器人由主体、驱21-10-26 09:09:01
工业机器人按臂部的运动形式分为四种:直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。机器人结构设计就找深圳基准机器人设计公司。工业机器人由主体、驱21-10-26 09:09:01 -
承载能力是指机器人在工作范围内的任何位姿上所能承受的质量。机器人的载荷不仅取决于负载的质量,而且还与机器人运行的速度和加速度的大小和方向有关。为了起见,承载能力是指高速运行时的承载能力。通常,承载能力不仅要考虑负载,而且还要考虑机器人末端操21-11-06 10:45:01
-
 工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。我国在19-07-09 18:36:01
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。我国在19-07-09 18:36:01 -
 很多企业对儿童机器人的外观设计也颇为讲究,因为在儿童领域竞争太激烈了,针对儿童的产品铺天盖地,所以很多机器人企业期望设计的产品是针对儿童,但是又不能像个玩具,不然很难卖的起价格。产品的实用性、美和环境是工业设计研究的主要内容。工业设计从一开21-11-29 08:54:01
很多企业对儿童机器人的外观设计也颇为讲究,因为在儿童领域竞争太激烈了,针对儿童的产品铺天盖地,所以很多机器人企业期望设计的产品是针对儿童,但是又不能像个玩具,不然很难卖的起价格。产品的实用性、美和环境是工业设计研究的主要内容。工业设计从一开21-11-29 08:54:01 -
 基准服务机器人设计团队在工业设计上的研究,涉及外观设计、人机交互、色彩应用等。例如老人护理型机器人的应用,因老年人的活动机能降低,需要借助于护理机器人延展其人体功能,能自助参与一些有限的社会活动,能借助机器人进行保健康复,不仅能提高老人的生21-10-15 17:12:01
基准服务机器人设计团队在工业设计上的研究,涉及外观设计、人机交互、色彩应用等。例如老人护理型机器人的应用,因老年人的活动机能降低,需要借助于护理机器人延展其人体功能,能自助参与一些有限的社会活动,能借助机器人进行保健康复,不仅能提高老人的生21-10-15 17:12:01 -
 河源机器人设计公司,河源机器人外观设计 ¥10000推进机器人在工业领域的应用示范1、汽车行业机器人应用示范汽车行业是国内工业机器人最大的应用行业,2015年占比约为36%。汽车行业对于焊接、喷涂、装配等工艺具有极高的要求标准,因此对机器人的性能也具有较高要求。我国汽车制造业多以合资企业为主18-10-08 21:13:09
河源机器人设计公司,河源机器人外观设计 ¥10000推进机器人在工业领域的应用示范1、汽车行业机器人应用示范汽车行业是国内工业机器人最大的应用行业,2015年占比约为36%。汽车行业对于焊接、喷涂、装配等工艺具有极高的要求标准,因此对机器人的性能也具有较高要求。我国汽车制造业多以合资企业为主18-10-08 21:13:09
被浏览过 4910752 次 版权所有:深圳基准机器人设计公司(ID:11429746) 技术支持:胡俊芝
第9年

