

-
- 公司:
- 深圳基准机器人设计公司
-
- 联系:
- 龚玟宾
-
- 邮箱:
- bmid@benchmark-id.com
-
- 手机:
-
13807495700
13808412765
-
- 电话:
-
0755-23761048
-
- 地址:
- 深圳市南山区前海月亮湾大道2076号中国高科大厦D栋7楼
-
- 微信:
-



- 新手设计师经常会犯的三个产品设计错误?1204阅读 2022-11-08 10:20:20
- 产品外观设计全过程中的难题1018阅读 2022-11-08 10:18:51
- 产品外观设计过程中会出现什么问题1063阅读 2022-11-08 10:16:45
- 机械设备外观设计和艺术设计之间的对比1105阅读 2022-11-08 10:14:26
- 产品外观设计基础规定详细介绍1354阅读 2022-11-08 10:13:09

深圳机器人结构设计图片,真诚的信誉,实在的服务
2024-05-19 03:00:01 1127次浏览

价 格:面议
串联机器人其串联式结构是一个开放的运动链,其所有运动杆并没有形成一个封闭的结构链。串联机器人的工作空间大,运动分析比较容易可以避免驱动轴之间的耦合效应。但其机构各轴必须要独立控制,并且需要搭配编码器和传感器来提高机构运动时的度。
多轴机器人又称单轴机械手,工业机械臂,电缸等,是以XYZ直角坐标系统为基本数学模型,以伺服电机、步进电机为驱动的单轴机械臂为基本工作单元,以滚珠丝杆、同步皮带、齿轮齿条为常用的传动方式所架构起来的机器人系统,可以完成在XYZ三维坐标系中任意一点的到达和遵循可控的运动轨迹。 多轴机器人采用运动控制系统实现对其的驱动及编程控制,直线、曲线等运动轨迹的生成为多点插补方式,操作及编程方式为引导示教编程方式或坐标定位方式。
我公司专注于工业机器人、服务机器人、无人机、智能硬件等产品的外观工业设计、结构设计、机械运动机构设计等。人工智能是是一种技术,一种算术,而机器人则是人工智能的一种终端应用。机器人的分类,大致可以分为工业机器人与服务机器人。根据其应用场景的不同,服务型机器人又可以分为二类:个人/家用机器人和专业服务机器人。
设计时应注意的重点: 1、机器人重心尽可能的低,机器人的重量侧重放在铲子和底盘上 2、连线四个轮子的着地点尽可能的是一个正方形,这样可以地实现原地转弯(当在擂台的四个角落里采用原地/弯调头)。 3、底盘上要尽可能不要有突出的螺丝钉,如果有突出的螺丝钉,在机器人上擂台的时候,容易卡在斜坡和擂台表面连接的棱角上。 4、底盘距离轮子着地点的高度要适宜,过高的话机器人中心偏高,不稳定;过低的话在前轮走过斜坡与擂台表明连接的棱角后底/会擦到棱角,造成前轮悬空的现象,有可能会因为驱动力不足导致上台失败。
-
 技术综合性强工业机器人与自动化成套技术,集中并融合了多项学科,涉及多项技术领域,包括工业机器人控制技术、机器人动力学及仿真、机器人构建有限元分析、激光加工技术、模块化程序设计、智能测量、建模加工一体化、工厂自动化以及精细物流等先进制造技术,21-10-26 09:00:01
技术综合性强工业机器人与自动化成套技术,集中并融合了多项学科,涉及多项技术领域,包括工业机器人控制技术、机器人动力学及仿真、机器人构建有限元分析、激光加工技术、模块化程序设计、智能测量、建模加工一体化、工厂自动化以及精细物流等先进制造技术,21-10-26 09:00:01 -
 一、国内机器人产业发展势头良好的企业 自2009年以来,我国机器人产业迎来发展高峰,一批企业开始投入机器人的研发和生产,经历了2-3年的技术积累及样机研制阶段,2012年以后自主品牌机器人的生产能力逐渐形成,一些企18-10-08 20:57:47
一、国内机器人产业发展势头良好的企业 自2009年以来,我国机器人产业迎来发展高峰,一批企业开始投入机器人的研发和生产,经历了2-3年的技术积累及样机研制阶段,2012年以后自主品牌机器人的生产能力逐渐形成,一些企18-10-08 20:57:47 -
 所以一个机器人外观的设计,是众多智慧的结晶,很多内部结构要从外观设计时就要构思好,终落地的机器人外观产品是否讨人喜欢,这是设计师与机器人企业共同的智慧结晶。随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领21-11-06 08:51:01
所以一个机器人外观的设计,是众多智慧的结晶,很多内部结构要从外观设计时就要构思好,终落地的机器人外观产品是否讨人喜欢,这是设计师与机器人企业共同的智慧结晶。随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领21-11-06 08:51:01 -
 “服务员行业目前的年龄层是二十岁上下的年轻人为主,而且这些年轻人往往工作不稳定,换工作的效率非常之高,这给餐厅带来许多麻烦与成本损失。”这是餐饮行业共同面临的现象。 送餐机器人不仅没有痛苦感,而且还不会产生情绪。这种特质对于餐厅来说既18-09-28 12:57:34
“服务员行业目前的年龄层是二十岁上下的年轻人为主,而且这些年轻人往往工作不稳定,换工作的效率非常之高,这给餐厅带来许多麻烦与成本损失。”这是餐饮行业共同面临的现象。 送餐机器人不仅没有痛苦感,而且还不会产生情绪。这种特质对于餐厅来说既18-09-28 12:57:34 -
 数据显示,目前,世界上至少有48个国家在发展机器人,其中25个国家已涉足服务型机器人开发。在日本、北美和欧洲,迄今已有7种类型计40余款服务型机器人进入实验和半商业化应用。近年来,全球服务机器人市场保持较快的增长速度,根据国际机器人联盟的数19-07-09 12:56:01
数据显示,目前,世界上至少有48个国家在发展机器人,其中25个国家已涉足服务型机器人开发。在日本、北美和欧洲,迄今已有7种类型计40余款服务型机器人进入实验和半商业化应用。近年来,全球服务机器人市场保持较快的增长速度,根据国际机器人联盟的数19-07-09 12:56:01 -
 已知最早的工业机器人,其符合ISO定义,是由“条例”格里菲斯P·泰勒于1937年完成并出版的Meccano杂志,1938年3月。几乎完全是用吊车状装置建成的Meccano件和动力由单个电动机。运动五轴是可能的,包括抢而抢旋转。自动化是用穿孔19-07-09 14:22:01
已知最早的工业机器人,其符合ISO定义,是由“条例”格里菲斯P·泰勒于1937年完成并出版的Meccano杂志,1938年3月。几乎完全是用吊车状装置建成的Meccano件和动力由单个电动机。运动五轴是可能的,包括抢而抢旋转。自动化是用穿孔19-07-09 14:22:01 -
 家用机器人的总销售量预计将超过30万台,它表明服务机器人市场即将进入一个崭新的阶段。从需求及设备现有的技术水平方面来看,残疾人用的机器人还没有达到人们预期的目标。未来10年,助残机器人肯定会成为服务机器人的一个关键的领域。许多重要的研究机构19-07-09 17:18:01
家用机器人的总销售量预计将超过30万台,它表明服务机器人市场即将进入一个崭新的阶段。从需求及设备现有的技术水平方面来看,残疾人用的机器人还没有达到人们预期的目标。未来10年,助残机器人肯定会成为服务机器人的一个关键的领域。许多重要的研究机构19-07-09 17:18:01 -
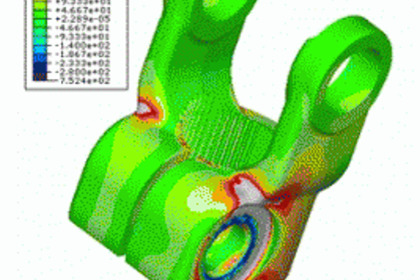 工业机器人的有限元分析理论、Ansys实体建模、3D图形导入转换、网格划分、前处理及加载和求解、结构强度分析、振动频率分析、谐响应分析、扭曲分析、机构尺寸优化分析、疲劳分析、热力分析、跌落测试、响应谱分析等有限元分析。 (注:Ansys可15-10-24 17:17:14
工业机器人的有限元分析理论、Ansys实体建模、3D图形导入转换、网格划分、前处理及加载和求解、结构强度分析、振动频率分析、谐响应分析、扭曲分析、机构尺寸优化分析、疲劳分析、热力分析、跌落测试、响应谱分析等有限元分析。 (注:Ansys可15-10-24 17:17:14 -
 送餐机器人的出现给现在的餐饮业带来了最大的福音。现在人口红利继续看涨,很多地方都面临招工难的现象。众多工厂对于工业机器人的需求非常巨大,同样地,餐饮行业也面临相似问题。服务员工作虽然简单,但是工作环境既要看人脸色,又要忍受收拾客人用过的餐具18-10-20 13:03:55
送餐机器人的出现给现在的餐饮业带来了最大的福音。现在人口红利继续看涨,很多地方都面临招工难的现象。众多工厂对于工业机器人的需求非常巨大,同样地,餐饮行业也面临相似问题。服务员工作虽然简单,但是工作环境既要看人脸色,又要忍受收拾客人用过的餐具18-10-20 13:03:55 -
 特别是针对复杂的机器人外观设计,有时候为了能够展现机器人的性能,我们在外观设计上是要有所牺牲的。“如图2的机房巡检机器人,红外感应器、防撞杆、超声波感应器等器件功能的实现对机器人外观设计有着特定的需求。”产品的实用性、美和环境是工业设计研究21-11-29 09:09:01
特别是针对复杂的机器人外观设计,有时候为了能够展现机器人的性能,我们在外观设计上是要有所牺牲的。“如图2的机房巡检机器人,红外感应器、防撞杆、超声波感应器等器件功能的实现对机器人外观设计有着特定的需求。”产品的实用性、美和环境是工业设计研究21-11-29 09:09:01 -
 这也很考验设计师的能力,深圳洛斯奇工业设计有限公司(简称:洛斯奇)总经理苏武香说:“很多机器人企业抛出很多概念性的东西,然后设计师需要去寻找大量的素材,又要贴合客户的要求,把外观设计具体化,这很考验设计师的能力。”对很多机器人企业而言,都希21-11-29 10:21:01
这也很考验设计师的能力,深圳洛斯奇工业设计有限公司(简称:洛斯奇)总经理苏武香说:“很多机器人企业抛出很多概念性的东西,然后设计师需要去寻找大量的素材,又要贴合客户的要求,把外观设计具体化,这很考验设计师的能力。”对很多机器人企业而言,都希21-11-29 10:21:01 -
机器人是一种自动执行的机械装置。它可以接受人类命令并运行预先编程的程序。它还可以按照人工智能技术制定的原则和原则办事。它的任务是帮助或取代人类的工作,比如生活。工业、建筑或危险类工作。我国的机器人专家从应用环境出发,将机器人也分为两大类,即21-10-20 16:48:01
-
图1是洛斯奇去年为联想设计的家庭机器人方案之一,联想要求设计出来的机器人适用于家庭,外观要能让家人感到感,而且容易被接纳,能成为家庭一员的角色。产品结构设计是在设计师针对产品的内-部结构、机械部分的设计;让它的生产环节中有低的开发成本、短的21-11-29 10:45:01
-
 服务机器人是机器人家族中的一个年轻成员,到目前为止尚没有一个严格的定义。不同国家对服务机器人的认识不同。可以分为专业领域服务机器人和个人/家庭服务机器人,服务机器人的应用范围很广,主要从事维护保养、修理、运输、清洗、保安、救援、监护等工作。19-07-09 18:28:01
服务机器人是机器人家族中的一个年轻成员,到目前为止尚没有一个严格的定义。不同国家对服务机器人的认识不同。可以分为专业领域服务机器人和个人/家庭服务机器人,服务机器人的应用范围很广,主要从事维护保养、修理、运输、清洗、保安、救援、监护等工作。19-07-09 18:28:01 -
 已知最早的工业机器人,其符合ISO定义,是由“条例”格里菲斯P·泰勒于1937年完成并出版的Meccano杂志,1938年3月。几乎完全是用吊车状装置建成的Meccano件和动力由单个电动机。运动五轴是可能的,包括抢而抢旋转。自动化是用穿孔19-07-09 15:20:01
已知最早的工业机器人,其符合ISO定义,是由“条例”格里菲斯P·泰勒于1937年完成并出版的Meccano杂志,1938年3月。几乎完全是用吊车状装置建成的Meccano件和动力由单个电动机。运动五轴是可能的,包括抢而抢旋转。自动化是用穿孔19-07-09 15:20:01 -
 气压驱动具有速度快、系统结构简单、维修方便、价格低等优点。但是气压装置的工作压强低,不易定位,一般仅用于工业机器人末端执行器的驱动。气动手抓、旋转气缸和气动吸盘作为末端执行器可用于中、小负荷的工件抓取和装配。机器人-环境交互系统是实现机器人21-10-18 18:00:01
气压驱动具有速度快、系统结构简单、维修方便、价格低等优点。但是气压装置的工作压强低,不易定位,一般仅用于工业机器人末端执行器的驱动。气动手抓、旋转气缸和气动吸盘作为末端执行器可用于中、小负荷的工件抓取和装配。机器人-环境交互系统是实现机器人21-10-18 18:00:01 -
 随着时代科技的快速发展,智能化机器人设计取得了重大突破,智能机器人不再属于科幻世界,未来将会有越来越多的智能机器人走进人们的现实生活。作为机器人进入人类日常生活、采取面向公众工作的新创作品,机器人设计师们一直不厌其烦地给它们的身体赋予线条以21-10-26 08:45:01
随着时代科技的快速发展,智能化机器人设计取得了重大突破,智能机器人不再属于科幻世界,未来将会有越来越多的智能机器人走进人们的现实生活。作为机器人进入人类日常生活、采取面向公众工作的新创作品,机器人设计师们一直不厌其烦地给它们的身体赋予线条以21-10-26 08:45:01 -
 餐厅机器人工业设计,智能送餐机器人外观设计 ¥10000机器人设计的成果最终要落实在生产上,工艺选择与成本控制是落地关键环节。 基准机器人设计团队在后期生产的研究上,主要注重于工艺、成本控制、质量监控上。例如服务机器人的外壳覆盖件的后期工艺,在给长沙地区的客户选择供应商时,因湖南机器人模具15-10-24 17:16:17
餐厅机器人工业设计,智能送餐机器人外观设计 ¥10000机器人设计的成果最终要落实在生产上,工艺选择与成本控制是落地关键环节。 基准机器人设计团队在后期生产的研究上,主要注重于工艺、成本控制、质量监控上。例如服务机器人的外壳覆盖件的后期工艺,在给长沙地区的客户选择供应商时,因湖南机器人模具15-10-24 17:16:17 -
 减速器选型 要对减速器的结构类型,性能参数的含义有深刻理解,会对减速器进行选型和计算校核。要会对减速器进行检测、测试,检测的内容主要包括噪音、抖动、输出扭矩、扭转刚度、背隙、重复定位精度和定位精度等。减速器的振动会引起机器人末端的抖动,降低21-10-26 09:48:01
减速器选型 要对减速器的结构类型,性能参数的含义有深刻理解,会对减速器进行选型和计算校核。要会对减速器进行检测、测试,检测的内容主要包括噪音、抖动、输出扭矩、扭转刚度、背隙、重复定位精度和定位精度等。减速器的振动会引起机器人末端的抖动,降低21-10-26 09:48:01 -
 我国在服务机器人领域的研发与日本、美国等国家相比起步较晚。在国家863计划的支持下,我国在服务机器人研究和产品研发方面已开展了大量工作,并取得了一定的成绩,如哈尔滨工业大学研制的导游机器人、迎宾机器人、清扫机器人等;华南理工大学研制的机器人19-07-09 12:20:01
我国在服务机器人领域的研发与日本、美国等国家相比起步较晚。在国家863计划的支持下,我国在服务机器人研究和产品研发方面已开展了大量工作,并取得了一定的成绩,如哈尔滨工业大学研制的导游机器人、迎宾机器人、清扫机器人等;华南理工大学研制的机器人19-07-09 12:20:01
被浏览过 4946890 次 版权所有:深圳基准机器人设计公司(ID:11429746) 技术支持:胡俊芝
第9年

