

-
- 公司:
- 深圳基准机器人设计公司
-
- 联系:
- 龚玟宾
-
- 邮箱:
- bmid@benchmark-id.com
-
- 手机:
-
13807495700
13808412765
-
- 电话:
-
0755-23761048
-
- 地址:
- 深圳市南山区前海月亮湾大道2076号中国高科大厦D栋7楼
-
- 微信:
-



- 新手设计师经常会犯的三个产品设计错误?1209阅读 2022-11-08 10:20:20
- 产品外观设计全过程中的难题1024阅读 2022-11-08 10:18:51
- 产品外观设计过程中会出现什么问题1068阅读 2022-11-08 10:16:45
- 机械设备外观设计和艺术设计之间的对比1113阅读 2022-11-08 10:14:26
- 产品外观设计基础规定详细介绍1365阅读 2022-11-08 10:13:09

深圳机器人结构设计,在线客服为您解答
2024-05-21 09:00:01 1139次浏览

价 格:面议
设计的本质是“制作符合美法则的东西。”工业设计是近代大规模的工业条件下,根据美国的法律,在建模的革新性的社会实践。这是一种非常有意识的技术和艺术形式。设计之美是基于技术开发和正式技术革新,是创造活动带来的心理经验的一种。设计审美评价,为了引导系统,本公司的产品设计技术上的美丽和形式的美丽的完美组合,为了探索成立了。为了追求设计活动中的感情和状况的魅力,为了获得感情的影响力和经验,为了使消费者能够有效地设计,设计练习,利用产品经验享受生活感情。
关于姿势的美丽时,通常这样的均匀性、节奏的这种物质和其组合构成的审美特性的材料的材料的自然属性(颜色、形状、生产线、声音等)(意味着,节奏等)。本论文,正式的美丽,这是视觉,感觉和听觉的属性之间的被表达。产品或服务的美丽和人类和机器的组合作为审美特性被定义,然后,感情,感情,把焦点放在艺术灵感思维。
我国的机器人专家从应用环境出发,将机器人也分为两大类,即工业机器人和特种机器人。这和国际上的分类是一致的。工业机器人是指面向工业领域的多关节机械手或多自由度机器人。特种机器人则是除工业机器人之外的、用于非制造业并服务于人类的各种先进机器人,包括:服务机器人、水下机器人、娱乐机器人、军用机器人、农业机器人等。在特种机器人中,有些分支发展很快,有独立成体系的趋势,如服务机器人、水下机器人、军用机器人、微操作机器人等。
自由度是指机器人所具有的独立坐标轴运动的数目,不包括手爪(末端操作器)的开合自由度。在三维空间中描述一个物体的位姿需要6个自由度。但是,机器人的自由度是根据其用途而设计的,可能少于6个自由度,也可能多于6个自由度。
-
 工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。我国在19-07-09 13:26:01
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。我国在19-07-09 13:26:01 -
 手臂活动区域对活动空间有很大的影响,而手腕是工具和主体的连接部分。与串联机器人相比较,并联机器人具有刚度大、结构稳定、承载能力大、微动精度高、运动负荷小的优点。在位置求解上,串联机器人的正解容易,但反解十分困难;而并联机器人则相反,其正解困21-10-13 18:45:01
手臂活动区域对活动空间有很大的影响,而手腕是工具和主体的连接部分。与串联机器人相比较,并联机器人具有刚度大、结构稳定、承载能力大、微动精度高、运动负荷小的优点。在位置求解上,串联机器人的正解容易,但反解十分困难;而并联机器人则相反,其正解困21-10-13 18:45:01 -
 当机器人操作臂达到所要求的定位精度有困难时,可采用辅助工夹具协助定位的办法,即机器人操作臂把被抓取物体送到工、夹具进行粗定位,然后利用工、夹具的夹紧动作实现工件的后定位。这种办法既能保证工艺要求,又可降低机器人操作臂的定位要求。随着科技的进21-11-06 08:48:01
当机器人操作臂达到所要求的定位精度有困难时,可采用辅助工夹具协助定位的办法,即机器人操作臂把被抓取物体送到工、夹具进行粗定位,然后利用工、夹具的夹紧动作实现工件的后定位。这种办法既能保证工艺要求,又可降低机器人操作臂的定位要求。随着科技的进21-11-06 08:48:01 -
 基准人工智能,是基准工业设计旗下专业从事机器人与设计的部门,专注于工业机器人、服务机器人、的产品策略、市场研究、外观设计、结构设计、机构设计等。在深圳、佛山、长沙、武汉等地开展相关的设计服务。应用行业:可应用于机械、汽车、家电、电子产品、家18-10-16 20:57:14
基准人工智能,是基准工业设计旗下专业从事机器人与设计的部门,专注于工业机器人、服务机器人、的产品策略、市场研究、外观设计、结构设计、机构设计等。在深圳、佛山、长沙、武汉等地开展相关的设计服务。应用行业:可应用于机械、汽车、家电、电子产品、家18-10-16 20:57:14 -
 服务机器人的应用范围很广,主要从事维护保养、修理、运输、清洗、保安、救援、监护等工作。国际机器人联合会经过几年的搜集整理,给了服务机器人一个初步的定义:服务机器人是一种半自主或全自主工作的机器人,它能完成有益于人类健康的服务工作,但不包括从19-07-09 16:56:01
服务机器人的应用范围很广,主要从事维护保养、修理、运输、清洗、保安、救援、监护等工作。国际机器人联合会经过几年的搜集整理,给了服务机器人一个初步的定义:服务机器人是一种半自主或全自主工作的机器人,它能完成有益于人类健康的服务工作,但不包括从19-07-09 16:56:01 -
 手臂活动区域对活动空间有很大的影响,而手腕是工具和主体的连接部分。与串联机器人相比较,并联机器人具有刚度大、结构稳定、承载能力大、微动精度高、运动负荷小的优点。在位置求解上,串联机器人的正解容易,但反解十分困难;而并联机器人则相反,其正解困21-10-13 18:36:01
手臂活动区域对活动空间有很大的影响,而手腕是工具和主体的连接部分。与串联机器人相比较,并联机器人具有刚度大、结构稳定、承载能力大、微动精度高、运动负荷小的优点。在位置求解上,串联机器人的正解容易,但反解十分困难;而并联机器人则相反,其正解困21-10-13 18:36:01 -
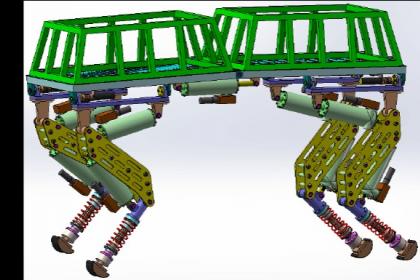
 工业机器人的机械结构部分称为操作机。它由机座、腰部、大臂、小臂、腕部及手部组成。即由手臂机构和手腕机构组成。手臂机构一般为2~3个自由度,要求可实现回转、仰俯、升降或伸缩三种运动形式。手臂机构设计时,先要确定其结构型式和尺寸,还需考虑各种构21-10-15 17:48:01
工业机器人的机械结构部分称为操作机。它由机座、腰部、大臂、小臂、腕部及手部组成。即由手臂机构和手腕机构组成。手臂机构一般为2~3个自由度,要求可实现回转、仰俯、升降或伸缩三种运动形式。手臂机构设计时,先要确定其结构型式和尺寸,还需考虑各种构21-10-15 17:48:01 -
 首先,设计定位是设计活动展开的前提,它决议了整个设计活动所要到达的目的,这一目的完成是由设计系统互相之间的配合来共同完成的,设计准备阶段假如对设计的定位了解不透彻,材料准备得不充分,将会影响后面的设计构思,而设计深化和设计完善阶段剖析得不够21-11-29 10:12:01
首先,设计定位是设计活动展开的前提,它决议了整个设计活动所要到达的目的,这一目的完成是由设计系统互相之间的配合来共同完成的,设计准备阶段假如对设计的定位了解不透彻,材料准备得不充分,将会影响后面的设计构思,而设计深化和设计完善阶段剖析得不够21-11-29 10:12:01 -
 不管是商用类、家用类、还是教育陪伴类机器人,没有办法用一种设计方案去应对所有的使用场景。图1是洛斯奇去年为联想设计的家庭机器人方案之一,联想要求设计出来的机器人适用于家庭,外观要能让家人感到感,而且容易被接纳,能成为家庭一员的角色。 机器人21-11-29 10:45:01
不管是商用类、家用类、还是教育陪伴类机器人,没有办法用一种设计方案去应对所有的使用场景。图1是洛斯奇去年为联想设计的家庭机器人方案之一,联想要求设计出来的机器人适用于家庭,外观要能让家人感到感,而且容易被接纳,能成为家庭一员的角色。 机器人21-11-29 10:45:01 -
 从机械结构来看,工业机器人总体上分为串联机器人和并联机器人。串联机器人的特点是一个轴的运动会改变另一个轴的坐标原点,而并联机器人一个轴运动则不会改变另一个轴的坐标原点。早期的工业机器人都是采用串联机构。并联机构定义为动平台和定平台通过至少两21-11-06 10:12:01
从机械结构来看,工业机器人总体上分为串联机器人和并联机器人。串联机器人的特点是一个轴的运动会改变另一个轴的坐标原点,而并联机器人一个轴运动则不会改变另一个轴的坐标原点。早期的工业机器人都是采用串联机构。并联机构定义为动平台和定平台通过至少两21-11-06 10:12:01 -
 对很多机器人企业而言,都希望产品设计的外观要有独特性,又要别具一格的魅力,能吸引住用户。不管是商用类、家用类、还是教育陪伴类机器人,没有办法用一种设计方案去应对所有的使用场景。当然设计出来的机器人外观,能否实现的了量产,考验设计师的设计经验21-11-29 10:36:01
对很多机器人企业而言,都希望产品设计的外观要有独特性,又要别具一格的魅力,能吸引住用户。不管是商用类、家用类、还是教育陪伴类机器人,没有办法用一种设计方案去应对所有的使用场景。当然设计出来的机器人外观,能否实现的了量产,考验设计师的设计经验21-11-29 10:36:01 -
 机器人结构设计,机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。服务机器人更多的是直接与人打21-10-15 17:30:01
机器人结构设计,机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。服务机器人更多的是直接与人打21-10-15 17:30:01 -
 控制关键技术 (1)运动解算及轨迹规划 运动求解,路径规划,提高机器人的运动精度和工作效率。 [5] (2)动力学补偿 一般工业机器人是一个串联悬臂式结构,刚性弱,运动复杂,容易发生变形和抖动,是一个需要运动学和动力学相结合的课题。为了改善21-10-26 08:57:01
控制关键技术 (1)运动解算及轨迹规划 运动求解,路径规划,提高机器人的运动精度和工作效率。 [5] (2)动力学补偿 一般工业机器人是一个串联悬臂式结构,刚性弱,运动复杂,容易发生变形和抖动,是一个需要运动学和动力学相结合的课题。为了改善21-10-26 08:57:01 -
 智能化、仿生化是工业机器人的阶段,随着材料、控制等技术不断发展,实验室产品越来越多的产品化,逐步应用於各个场合。伴随移动互联网、物联网的发展,多传感器、分布式控制的精密型工业机器人将会越来越多,逐步渗透制造业的方方面面,并且由制造实施型向服21-10-26 10:36:01
智能化、仿生化是工业机器人的阶段,随着材料、控制等技术不断发展,实验室产品越来越多的产品化,逐步应用於各个场合。伴随移动互联网、物联网的发展,多传感器、分布式控制的精密型工业机器人将会越来越多,逐步渗透制造业的方方面面,并且由制造实施型向服21-10-26 10:36:01 -
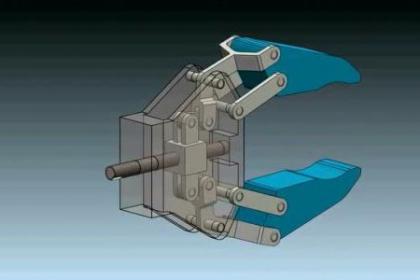
 特别是针对复杂的机器人外观设计,有时候为了能够展现机器人的性能,我们在外观设计上是要有所牺牲的。比如要实现机器人手臂的运动功能,其外观设计就要考虑到各个节点以及内部信息的传达感应。此外,结构及外观还要满足交互的需求,从表情到动作都不能让人感21-11-29 10:27:01
特别是针对复杂的机器人外观设计,有时候为了能够展现机器人的性能,我们在外观设计上是要有所牺牲的。比如要实现机器人手臂的运动功能,其外观设计就要考虑到各个节点以及内部信息的传达感应。此外,结构及外观还要满足交互的需求,从表情到动作都不能让人感21-11-29 10:27:01 -
 智能机器人外观设计,陪护机器人设计 ¥100002016年可以称之为人工智能的崛起元年。标志性事件就是阿法狗以4:1击败当今世界的顶级围棋棋手李世石。 人工智能是是一种技术,一种算术,而机器人则是人工智能的一种终端应用。机器人的分类,大致可以分为工业机器人与服务机器人。根据其应用场15-10-24 17:19:24
智能机器人外观设计,陪护机器人设计 ¥100002016年可以称之为人工智能的崛起元年。标志性事件就是阿法狗以4:1击败当今世界的顶级围棋棋手李世石。 人工智能是是一种技术,一种算术,而机器人则是人工智能的一种终端应用。机器人的分类,大致可以分为工业机器人与服务机器人。根据其应用场15-10-24 17:19:24 -
 并联机构有两个构成部分,分别是手腕和手臂。手臂活动区域对活动空间有很大的影响,而手腕是工具和主体的连接部分。与串联机器人相比较,并联机器人具有刚度大、结构稳定、承载能力大、微动精度高、运动负荷小的优点。在位置求解上,串联机器人的正解容易,但21-10-18 19:00:01
并联机构有两个构成部分,分别是手腕和手臂。手臂活动区域对活动空间有很大的影响,而手腕是工具和主体的连接部分。与串联机器人相比较,并联机器人具有刚度大、结构稳定、承载能力大、微动精度高、运动负荷小的优点。在位置求解上,串联机器人的正解容易,但21-10-18 19:00:01 -
 串联机器人其串联式结构是一个开放的运动链,其所有运动杆并没有形成一个封闭的结构链。串联机器人的工作空间大,运动分析比较容易可以避免驱动轴之间的耦合效应。但其机构各轴必须要独立控制,并且需要搭配编码器和传感器来提高机构运动时的度。服务机器人更21-10-26 09:15:01
串联机器人其串联式结构是一个开放的运动链,其所有运动杆并没有形成一个封闭的结构链。串联机器人的工作空间大,运动分析比较容易可以避免驱动轴之间的耦合效应。但其机构各轴必须要独立控制,并且需要搭配编码器和传感器来提高机构运动时的度。服务机器人更21-10-26 09:15:01 -
 工业机器人最显著的特点有以下几个:(1)可编程。生产自动化的进一步发展是柔性启动化。工业机器人可随其工作环境变化的需要而再编程,因此它在小批量多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统中的一个重要组成部分。(2)拟19-07-09 14:06:02
工业机器人最显著的特点有以下几个:(1)可编程。生产自动化的进一步发展是柔性启动化。工业机器人可随其工作环境变化的需要而再编程,因此它在小批量多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统中的一个重要组成部分。(2)拟19-07-09 14:06:02 -
机器人是一种自动执行的机械装置。它可以接受人类命令并运行预先编程的程序。它还可以按照人工智能技术制定的原则和原则办事。它的任务是帮助或取代人类的工作,比如生活。工业、建筑或危险类工作。这里技术美指代产品的核心功能,即,使用产品功能、产品的材21-10-20 17:45:01
被浏览过 4952456 次 版权所有:深圳基准机器人设计公司(ID:11429746) 技术支持:胡俊芝
第9年

