

-
- 公司:
- 深圳基准机器人设计公司
-
- 联系:
- 龚玟宾
-
- 邮箱:
- bmid@benchmark-id.com
-
- 手机:
-
13807495700
13808412765
-
- 电话:
-
0755-23761048
-
- 地址:
- 深圳市南山区前海月亮湾大道2076号中国高科大厦D栋7楼
-
- 微信:
-

本站共被浏览过 4871008 次


- 新手设计师经常会犯的三个产品设计错误?1078阅读 2022-11-08 10:20:20
- 产品外观设计全过程中的难题893阅读 2022-11-08 10:18:51
- 产品外观设计过程中会出现什么问题954阅读 2022-11-08 10:16:45
- 机械设备外观设计和艺术设计之间的对比977阅读 2022-11-08 10:14:26
- 产品外观设计基础规定详细介绍1221阅读 2022-11-08 10:13:09

产品信息
您所在的位置:首页 > 详细信息
深圳自由度并联机器人外观工业设计,按需定制产品
2024-04-19 10:22:01 9087次浏览
价 格:面议
自由度并联机构是并联机器人机构中的一大类,是国内外学者研究得多的并联机构,广泛应用在飞行模拟器、6维力与力矩传感器和并联机床等领域。但这类机构有很多关键性技术没有或没有完全得到解决,比如其运动学正解、动力学模型的建立以及并联机床的精度标定等。
通过对本文的阅读,大家对工业机器人的分类应该也形成了自己的认识,如果还有不懂的小伙伴,欢迎留言询问,基准工业设计将为您解答。基准工业设计是基准设计机构的下属事业部,中国的智能设备设计专家。基准工业设计专注于机械设备、机器人的产品策略、市场研究、外观设计、结构机构设计等。
-
 家用机器人的总销售量预计将超过30万台,它表明服务机器人市场即将进入一个崭新的阶段。从需求及设备现有的技术水平方面来看,残疾人用的机器人还没有达到人们预期的目标。未来10年,助残机器人肯定会成为服务机器人的一个关键的领域。许多重要的研究机构19-07-09 18:44:01
家用机器人的总销售量预计将超过30万台,它表明服务机器人市场即将进入一个崭新的阶段。从需求及设备现有的技术水平方面来看,残疾人用的机器人还没有达到人们预期的目标。未来10年,助残机器人肯定会成为服务机器人的一个关键的领域。许多重要的研究机构19-07-09 18:44:01 -
 产品的设计是而实际呈现的体型展示。为了向客户展示产品的主要种类,我们需要引用各种各样的技术内容和艺术创意,根据功能和产品的审美规则进行革新。设计的独立性是强有力的,艺术的美丽的光滑,以及美丽的价值的保证融合到艺术爱好者的生活。“美”的设计,21-10-20 17:30:01
产品的设计是而实际呈现的体型展示。为了向客户展示产品的主要种类,我们需要引用各种各样的技术内容和艺术创意,根据功能和产品的审美规则进行革新。设计的独立性是强有力的,艺术的美丽的光滑,以及美丽的价值的保证融合到艺术爱好者的生活。“美”的设计,21-10-20 17:30:01 -
数据显示,目前,世界上至少有48个国家在发展机器人,其中25个国家已涉足服务型机器人开发。在日本、北美和欧洲,迄今已有7种类型计40余款服务型机器人进入实验和半商业化应用。近年来,全球服务机器人市场保持较快的增长速度,根据国际机器人联盟的数19-07-09 17:58:01
-
 工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。工业机18-10-24 10:24:39
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。工业机18-10-24 10:24:39 -
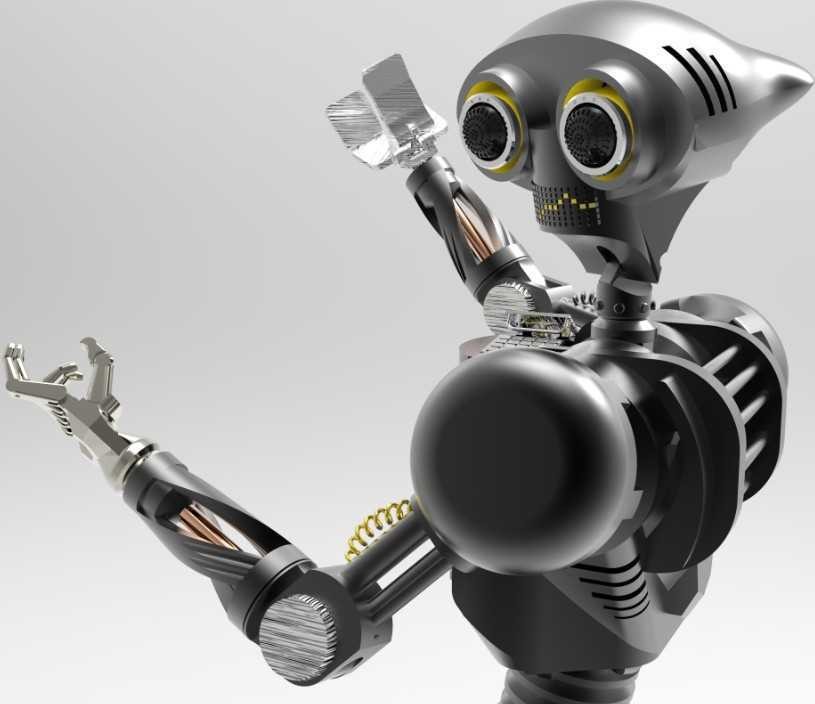
 并联机构有两个构成部分,分别是手腕和手臂。手臂活动区域对活动空间有很大的影响,而手腕是工具和主体的连接部分。与串联机器人相比较,并联机器人具有刚度大、结构稳定、承载能力大、微动精度高、运动负荷小的优点。在位置求解上,串联机器人的正解容易,但21-10-18 19:09:01
并联机构有两个构成部分,分别是手腕和手臂。手臂活动区域对活动空间有很大的影响,而手腕是工具和主体的连接部分。与串联机器人相比较,并联机器人具有刚度大、结构稳定、承载能力大、微动精度高、运动负荷小的优点。在位置求解上,串联机器人的正解容易,但21-10-18 19:09:01 -
技术先进工业机器人集精密化、柔性化、智能化、软件应用开发等先进制造技术于一体,通过对过程实施检测、控制、优化、调度、管理和决策,实现增加产量、提高质量、降低成本、减少资源消耗和环境污染,是工业自动化水平的最高体现。工业机器人由主体、驱动系统19-07-09 14:18:01
-
 机器人结构设计,机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。服务机器人更多的是直接与人打21-10-15 17:09:01
机器人结构设计,机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。服务机器人更多的是直接与人打21-10-15 17:09:01 -
 随着时代科技的快速发展,智能化机器人设计取得了重大突破,智能机器人不再属于科幻世界,未来将会有越来越多的智能机器人走进人们的现实生活。作为机器人进入人类日常生活、采取面向公众工作的新创作品,机器人设计师们一直不厌其烦地给它们的身体赋予线条以21-10-15 18:30:01
随着时代科技的快速发展,智能化机器人设计取得了重大突破,智能机器人不再属于科幻世界,未来将会有越来越多的智能机器人走进人们的现实生活。作为机器人进入人类日常生活、采取面向公众工作的新创作品,机器人设计师们一直不厌其烦地给它们的身体赋予线条以21-10-15 18:30:01 -
 基准人工智能,是基准工业设计旗下专业从事机器人与设计的部门,专注于工业机器人、服务机器人、的产品策略、市场研究、外观设计、结构设计、机构设计等。在深圳、佛山、长沙、武汉等地开展相关的设计服务。应用行业:可应用于机械、汽车、家电、电子产品、家18-10-16 20:57:27
基准人工智能,是基准工业设计旗下专业从事机器人与设计的部门,专注于工业机器人、服务机器人、的产品策略、市场研究、外观设计、结构设计、机构设计等。在深圳、佛山、长沙、武汉等地开展相关的设计服务。应用行业:可应用于机械、汽车、家电、电子产品、家18-10-16 20:57:27 -
 机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。工业机器人控制技术的主要任务就是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等。具有编程简单、软件菜单操作、友好的人机交互界面、在线操作提示和使用方便21-10-26 09:21:01
机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。工业机器人控制技术的主要任务就是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等。具有编程简单、软件菜单操作、友好的人机交互界面、在线操作提示和使用方便21-10-26 09:21:01 -
 机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。工业机器人控制技术的主要任务就是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等。具有编程简单、软件菜单操作、友好的人机交互界面、在线操作提示和使用方便21-10-26 08:48:01
机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。工业机器人控制技术的主要任务就是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等。具有编程简单、软件菜单操作、友好的人机交互界面、在线操作提示和使用方便21-10-26 08:48:01 -
 数据显示,目前,世界上至少有48个国家在发展机器人,其中25个国家已涉足服务型机器人开发。在日本、北美和欧洲,迄今已有7种类型计40余款服务型机器人进入实验和半商业化应用。近年来,全球服务机器人市场保持较快的增长速度,根据国际机器人联盟的数19-07-09 13:08:01
数据显示,目前,世界上至少有48个国家在发展机器人,其中25个国家已涉足服务型机器人开发。在日本、北美和欧洲,迄今已有7种类型计40余款服务型机器人进入实验和半商业化应用。近年来,全球服务机器人市场保持较快的增长速度,根据国际机器人联盟的数19-07-09 13:08:01 -
 专门从事机器人结构设计,坐标机器可以被应用于点胶、滴塑、喷涂、码垛、分拣、包装、焊接、金属加工、搬运、上下料、装配、印刷等常见的工业生产领域,在替代人工,提高生产效率,稳定产品质量等方面都具备显著的应用价值。坐标机器人是能够实现自动控制的、21-10-26 10:24:01
专门从事机器人结构设计,坐标机器可以被应用于点胶、滴塑、喷涂、码垛、分拣、包装、焊接、金属加工、搬运、上下料、装配、印刷等常见的工业生产领域,在替代人工,提高生产效率,稳定产品质量等方面都具备显著的应用价值。坐标机器人是能够实现自动控制的、21-10-26 10:24:01 -
 已知最早的工业机器人,其符合ISO定义,是由“条例”格里菲斯P·泰勒于1937年完成并出版的Meccano杂志,1938年3月。几乎完全是用吊车状装置建成的Meccano件和动力由单个电动机。运动五轴是可能的,包括抢而抢旋转。自动化是用穿孔19-07-09 13:16:01
已知最早的工业机器人,其符合ISO定义,是由“条例”格里菲斯P·泰勒于1937年完成并出版的Meccano杂志,1938年3月。几乎完全是用吊车状装置建成的Meccano件和动力由单个电动机。运动五轴是可能的,包括抢而抢旋转。自动化是用穿孔19-07-09 13:16:01 -
 承载能力是指机器人在工作范围内的任何位姿上所能承受的质量。机器人的载荷不仅取决于负载的质量,而且还与机器人运行的速度和加速度的大小和方向有关。为了起见,承载能力是指高速运行时的承载能力。通常,承载能力不仅要考虑负载,而且还要考虑机器人末端操21-11-06 09:18:01
承载能力是指机器人在工作范围内的任何位姿上所能承受的质量。机器人的载荷不仅取决于负载的质量,而且还与机器人运行的速度和加速度的大小和方向有关。为了起见,承载能力是指高速运行时的承载能力。通常,承载能力不仅要考虑负载,而且还要考虑机器人末端操21-11-06 09:18:01 -
 控制系统的任务是根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。如果机器人不具备信息反馈特征,则为开环控制系统;具备信息反馈特征,则为闭环控制系统。根据控制原理可分为程序控制系统、适应性控制系统和21-10-18 18:30:01
控制系统的任务是根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。如果机器人不具备信息反馈特征,则为开环控制系统;具备信息反馈特征,则为闭环控制系统。根据控制原理可分为程序控制系统、适应性控制系统和21-10-18 18:30:01 -
 想要降低出错的概率,我们就要做好规划,有计划的进行,而进行机器人设计也是如此。为了顺利进行机器人设计,下面为大家说一下机器人设计步骤。 一、机器人设计和大部分的机械设计过程是差不多的,首先需要知道机器人设计的目的,机器人能够实现哪些功能以及22-09-28 21:30:17
想要降低出错的概率,我们就要做好规划,有计划的进行,而进行机器人设计也是如此。为了顺利进行机器人设计,下面为大家说一下机器人设计步骤。 一、机器人设计和大部分的机械设计过程是差不多的,首先需要知道机器人设计的目的,机器人能够实现哪些功能以及22-09-28 21:30:17 -
 设计时应注意的重点:1、机器人重心尽可能的低,机器人的重量侧重放在铲子和底盘上2、连线四个轮子的着地点尽可能的是一个正方形,这样可以地实现原地转弯(当在擂台的四个角落里采用原地/弯调头)。3、底盘上要尽可能不要有突出的螺丝钉,如果有突出的螺21-10-15 16:36:01
设计时应注意的重点:1、机器人重心尽可能的低,机器人的重量侧重放在铲子和底盘上2、连线四个轮子的着地点尽可能的是一个正方形,这样可以地实现原地转弯(当在擂台的四个角落里采用原地/弯调头)。3、底盘上要尽可能不要有突出的螺丝钉,如果有突出的螺21-10-15 16:36:01 -
 气压驱动具有速度快、系统结构简单、维修方便、价格低等优点。但是气压装置的工作压强低,不易定位,一般仅用于工业机器人末端执行器的驱动。气动手抓、旋转气缸和气动吸盘作为末端执行器可用于中、小负荷的工件抓取和装配。机器人感知系统把机器人各种内部状21-10-13 18:33:02
气压驱动具有速度快、系统结构简单、维修方便、价格低等优点。但是气压装置的工作压强低,不易定位,一般仅用于工业机器人末端执行器的驱动。气动手抓、旋转气缸和气动吸盘作为末端执行器可用于中、小负荷的工件抓取和装配。机器人感知系统把机器人各种内部状21-10-13 18:33:02 -
 控制系统的任务是根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。如果机器人不具备信息反馈特征,则为开环控制系统;具备信息反馈特征,则为闭环控制系统。根据控制原理可分为程序控制系统、适应性控制系统和21-10-26 10:27:01
控制系统的任务是根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。如果机器人不具备信息反馈特征,则为开环控制系统;具备信息反馈特征,则为闭环控制系统。根据控制原理可分为程序控制系统、适应性控制系统和21-10-26 10:27:01
被浏览过 4871008 次 版权所有:深圳基准机器人设计公司(ID:11429746) 技术支持:胡俊芝
第9年

